
卫星集群体系架构,应该如何设计?
01 小型卫星集群概述
小型卫星相对传统卫星具备独特的性能优势,如相对轻量化、低成本和快速生产能力。通过对单个大型卫星与小卫星集群全面对比研究,可以看出,就执行复杂空间任务的成本效益而言,考虑到所需的地面站和安装数量,大型卫星在初始成本上更具经济效益,但考虑到小卫星集群可以在空间和地面系统相互支持的情况下不间断执行大量任务,小型卫星集群在初始设置完成后将变得更具经济性。
由于这些原因,小型卫星正在获得广泛的应用,并不断开发新能力,可用于多元化任务,如通信或遥感等;然而,由于小卫星存在质量、体积、功率和有效载荷的各种限制,当前部分空间任务必须使用集群编队而不是单个小卫星来执行。
一般来说,该卫星集群的寿命根据轨道参数的改变而变化,这些小型卫星的设计中大都没有推进系统。在外轨道扰动和无轨道修正的影响下,在低轨400公里处运行的卫星集群的使用寿命约为数月,而在低轨700公里处的类似卫星集群的使用年限约为数年。因此,必须从设计时就确定任务的要求和使用寿命,并且必须建设恰当的架构以在最佳轨道高度运行。
卫星集群可以执行交会(rendezvous)、编队飞行或立体成像等复杂空间任务。最典型的应用是美国“星链”系统,可提供全方位互联网服务。但这类卫星不可避免地会在低轨轨道上增加轨道碰撞的风险。
02 集群卫星架构分类
集群卫星架构通常按距离和控制精度细分。飞行编队是分布式空间系统的一个子集,以空间和控制精度为特征。编队体系架构多种多样,从卫星间距为10米的局部卫星编队系统,到间隔数千公里的全球体系架构。
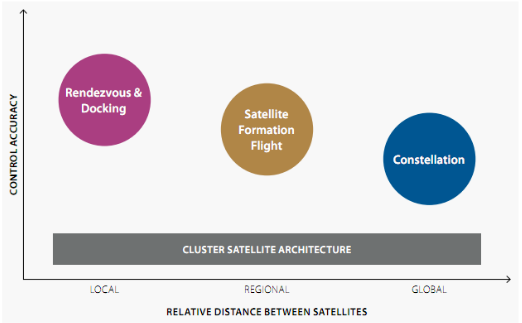
图1:相对距离和控制精度是太空系统集群进行区分的关键
图1所示的主要集群卫星体系架构可定义为三个类型:
星座架构:由许多在类似轨道上部署的卫星组成,在时间和位置上适当分布,以确保所需的对地覆盖面。卫星由地面控制站单独控制。典型案例是低轨部署的全球定位系统(GPS)星座架构
卫星编队飞行体系架构:一种面向任务和探测的多卫星体系架构,其相对位置由闭环内部控制系统进行控制。与星座架构不同,卫星间距离相对较短
交会对接架构:控制精度最为精细,空间平台间的距离也相对最短。控制灵敏度随着空间平台之间相对距离的减小而成比例地增加
在体系架构设计方面,确定集群几何形状和所需卫星数量非常重要。编队形成后,微分扰动加速度将会逐渐破坏初始几何形状。应根据用户的需要,主动控制编队的相对几何结构是对抗轨道畸变的一项要求,特别是在低轨轨道内。因此,应使用相对引导、导航和控制(GNC)系统在所需时间内对编队进行保持。通常,应在卫星上实施闭环控制方案,如图2所示。引导信息应由地面站或集群内其他卫星的自主内部传感器提供。
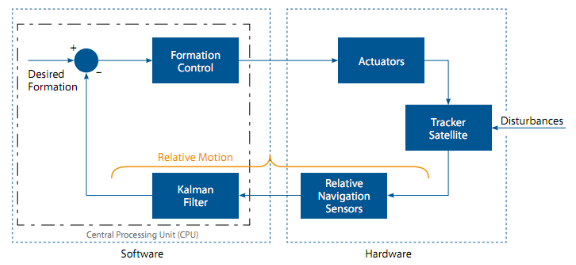
图2:卫星集群闭环控制流程
相对导航涉及平台相对于另一平台的位置和速度的最优化估测。在此方面,有大量的传统应用,例如全球导航卫星系统(GNSS)和惯性导航系统(INS),需要其它的连接方式。最新的应用使用光学和图像处理以及传感和跟踪模型,旨在降低总体复杂性,并提高精度。
03 优劣分析
除上文提到的轻量化、低成本和快速生产能力外,与单个卫星相比,卫星集群还将提供更大的感知视野和覆盖范围,同时还可以进行三维地球观测和干涉测量研究。
在卫星集群中,每个构成部分都更小、更轻、更易于构建;因此,与单个大型卫星相比,集群卫星的概念成本更低,复杂度更低。此外,单个卫星的故障对整个任务来说并不再那么重要,因为故障卫星可以很容易地被备用卫星替换。
集群卫星概念同样存在着一些限制和挑战,如太空操作和太空环境的复杂性、任务性质的特殊性以及互操作性问题,这是由于其自主系统和传感器多样性造成的。
在集群卫星应用中,最重要的是根据用户和空间任务要求设计卫星编队体系架构。在小卫星编队过程中,必须精确确定每颗卫星的运动参数和相对几何扰动。此外,使用基于视觉传感器的高性能系统,有可能捕获航天器和空间碎片的运动,并预测其相对矢量状态,随后可用于会合、对接或导航,以确定轨道运动并避免碰撞。
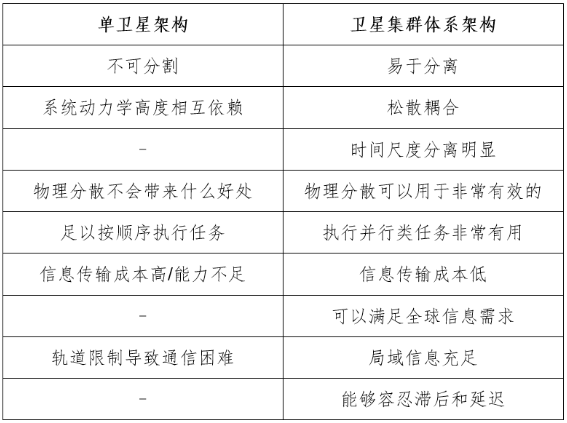
下表展示了单卫星系统和卫星集群体系相应的特征对比情况:
04 主要考虑因素
针对小型卫星集群体系架构,JAPCC认为,其主要考虑因素包括以下几类:
确定位置与姿态。使用微型传感器确定卫星位置,分析测量结果,精确判断卫星间的相对距离。
位置和姿态的自主控制。将确定计划开展对地测量位置和卫星朝向目标姿态间的偏差,以确定相应的校正操纵方案。由于轨道的性质,与地面控制站的联系有限,因此必须发展卫星实时应对能力。
卫星集群架构的运行。控制卫星编队需要协调地面控制交互,其特点是信号传播延迟和间断,以及内置的自主应对能力。可仅对“领头”卫星实现位置控制功能,跟随卫星将根据所设想的星座几何结构调整其相对于“领头”卫星的位置。
值得注意的是,小卫星在编队飞行时可能会使用不同的相对导航方法。传统上,GNSS和INS将进行集成用于搜寻相对位置。如果没有来自地面或全球导航卫星系统的数据,卫星将只能使用机载计算数据导航,这通常由内部传感器完成。
基于全球导航卫星系统的传感器的卫星集群体系架构。小卫星集群利用全球导航卫星系统信号,通过确定彼此的相对位置来维持星团的几何结构。这种方法正在使用,并已在许多集群卫星空间任务中得到验证。然而,由于全球导航卫星系统的覆盖范围有限,只有低轨卫星使用这种传统的相对导航方法。
基于视觉传感器的卫星集群架构。基于视觉的传感器系统将有效降低对外部系统的依赖。虽然全球导航卫星系统可用于近地轨道或中地球轨道的近距离卫星编队,但不能用于“深空”任务。因此,必须开发新型传感器技术,降低成本和有效载荷重量,同时将避免全球导航卫星系统性能上的限制。
相对导航算法。为了控制卫星,应相关算法进行观测和预测,从而估计卫星集群相对状态。典型可用算法包括单目同时定位和映射(SLAM)算法、卡尔曼滤波器、高斯和滤波器以及粒子滤波器算法等。
05 评析
综合JAPCC对集群卫星的全面分析,可以看出尽管卫星集群仍存在部分问题,但其未来大规模应用已是大势所趋,将打造新质空间架构,对当前以单卫星平台为代表的卫星体系造成巨大冲击。未来以集群卫星将具备以下关键特征:
一是分布式、高弹性。大量小卫星将分布式部署,随着自组织组网通信能力的不断提升,将大大提升系统弹性,具备系统可重构、航天器可替换、故障容错性强等特点,变革现有太空生态;
二是高自主、快响应。未来卫星集群将高度智能化,自主进行资源调度和任务规划,根据周边环境和任务要求实现智能控制,针对瞬息多变的太空环境和任务需求快速做出反应。
三是低价格、广替代。卫星集群从整体风险成本和效费比角度相对于传统卫星系统具备明显优势,未来很可能将广泛替代现有系统。美国下一代太空架构、黑杰克、高超音速和弹道跟踪空间传感器(HBTSS)等新质系统广泛使用卫星集群架构,已初步验证了该发展趋势。
参考链接:
https://www.japcc.org/articles/cluster-satellite-architectures/




评论 (0人参与)
最新评论