
低空航空器导航技术演进路线
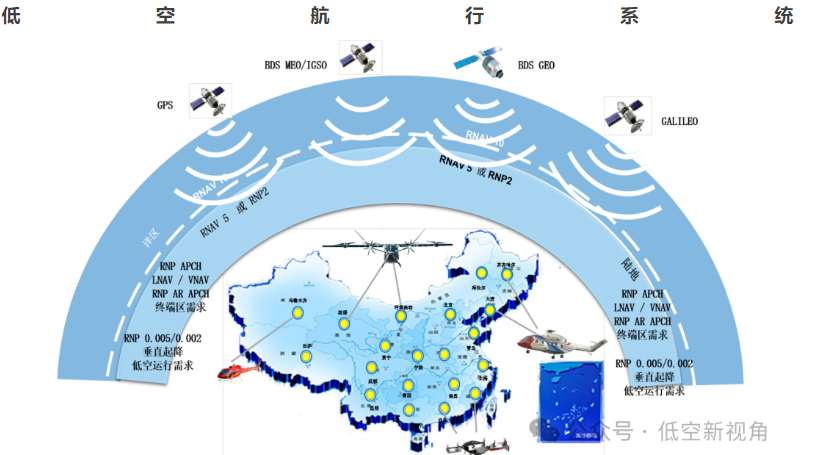
中国电子科技集团在《低空航行系统》中认为:低空运行采用基于性能的综合定位授时导航。其导航场景分为航路和空域,航路包括按不同高度层区分的双向航道、按照水平间隔划分的飞行速度航道,空域包括机场 / 起降点 / 投放点、作业区域。当前已采用的导航手段包括地基增强系统(GBAS)、星基增强系统(SBAS)等,采用的飞行程序有垂直引导进近(APV)-I、垂直引导定位信标(LPV)-200、盲降(CAT)-I等。
由于低空航空器运行引入垂直或短距起降引导,当前在起降点/投放点、作业区主要采用载波相位差分(RTK)/视觉为主用导航手段,根据任务需要在地面部署RTK基准站、视觉地标等基础设施,可支持航空器的任务起降、投放操作及作业区运行,导航精度达到10cm,需定义精准引导/降落飞行程序。鉴于RTK存在完好性问题,需要引入X等级地基增强系统进近服务(GAST X)导航概念以保障飞行安全。
基于性能的综合定位授时导航技术路线如下图所示。

第一阶段(近期):基本定位授时导航能力
本阶段为混合飞行阶段,低空航空器以空域大间隔的交通管理方式保障基本飞行安全,对导航的需求以高精度和高鲁棒性为主。本阶段的主要工作积极推动北斗系统应用,在航道阶段采用单频全球导航卫星系统/北斗星基增强系统(GNSS/BDSBAS)、全球导航卫星系统/接收机自主完好性监测 (1)(GNSS/RAIM)技术,提供 RNP0.005 导航服务;该类技术还可以为地面设施设备提供 40ns 授时服务。在机场采用 GBAS,单频 GBAS 服务提供水平 3m/ 垂直 4m 的导航精度(95%),2×10-7/ 任意进近完好性保证(在任意进近飞行过程中,发生危险误引导概率小于等于2×10-7,导航系统服务性能不满足用户需求时,及时发出告警能力)。在起降点、投放点、作业区采用RTK/视觉导航,RTK和视觉导航服务均提供水平8cm/垂直10cm的定位精度。
第二阶段(中期):增强定位授时导航能力
本阶段为融合运行阶段,低空飞行区域和航路逐渐联网成线、成片,各类航空器实现共享航路飞行,对导航的需求以同时保证高精度和高安全性为主。第一阶段的导航服务仍然保持,在航道阶段引入双频 GNSS/BDSBAS、双频全球导航卫星系统/先进接收机自主完好性监测(GNSS/ARAIM),提供RNP0.002的导航服务;该技术还可以为地面设施设备提供 20ns授时服务。在机场引入双频BDSBAS、双频GBAS,BDSBAS双频服务提供水平3m/垂直4m的定位精度(95%),2×10-7/任意进近完好性保证;GBAS双频服务提供水平1.5m/垂直2m的定位精度(95%),2×10-7/任意进近完好性保证。在起降点、投放点、作业区引入双频RTK/视觉导航,提供10厘米级的定位精度服务。
第三阶段(远期):融合定位授时导航能力
本阶段为自主运行智能协同阶段,低空场景规模进一步扩大,航空器种类数量众多,低空经济繁荣壮大的阶段,航空器采用弹性导航方式飞行,对导航的需求为同时保证高精度、高安全性和高可用性为主。保持已有定位授时导航服务的同时,在航道阶段引入低轨卫星一体化导航,低轨卫星可以增强卫星导航信号,作为GNSS的增强与补充;也可以通过通信系统和导航系统融合,播发独立测距信号,形成备份的定位授时导航能力。在机场引入视觉着陆系统,在起降点、投放点、作业区引入GAST X/视觉,GAST X服务提供水平8cm/垂直10cm的定位精度(95%),2×10-7/任意进近完好性保证。






评论 (0人参与)
最新评论