觉得还不错?打赏一下吧?
你可以通过邀请其他用户来更快获得回答
这是我的个性签名
在话题 话题名称 下有 8 个回答
惯导算法
惯导算法主要包含哪些部分?使用simulink需要如何实现,希望能给出模型的参考框架!感谢
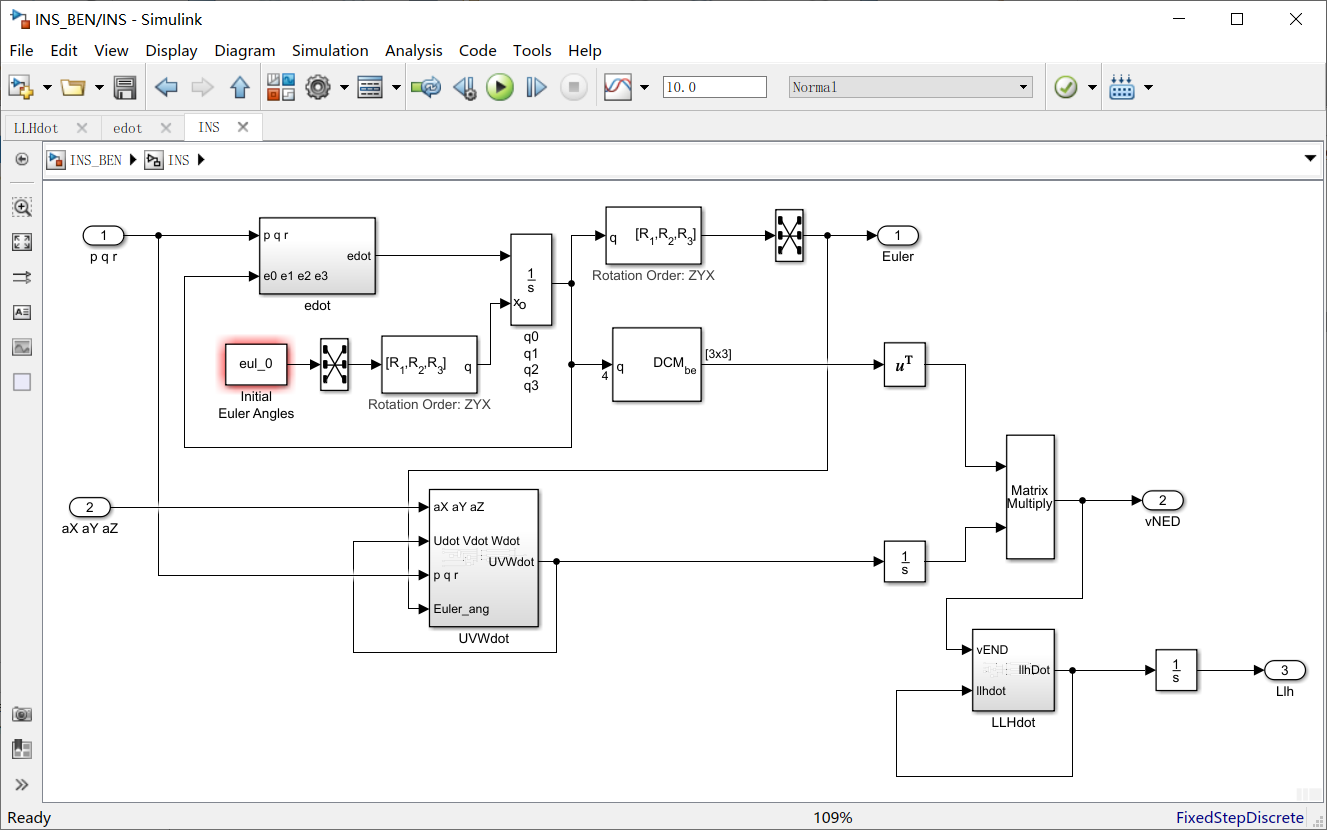
惯导算法的主要内容是三种状态的更新,即姿态算法更新、速度算法更新,和位置算法更新;其中的核心是姿态算法的更新。
更新姿态矩阵,常用的算法有欧拉角法、四元数法和方向余弦算法。
这是我根据参考资料自己搭建的惯导模型。输入是陀螺仪测出的滚转、俯仰、偏航角速率,和加速度计测出的东向、北向、天向加速度;输出为机体的姿态角、各向速度和经纬高。楼主可以参考一下。另外在库模型asbhl20中也有相关模块。
请登录后回答
相关问题