
日本SLIM月球着陆器姿态异常原因公布:1台主发动机无推力
据2024年1月25日报道,日本SLIM月球着陆器的实拍照片公布,证实着陆姿态故障,一台主发动机没有推力。
2024年1月20日,SLIM月球着陆器实现月球软着陆。然而,由于SLIM着陆时的姿态异常,导致太阳能电池无法发电,当天凌晨2点57分(日本标准时间),着陆器发出了关闭电源的指令。
通过分析电源关闭前获取的数据,任务团队确认SLIM已到达原定目标着陆点以东约55m的月球表面。此外,着陆器开始避障操作前,距月表高度约50m,定位精度估计为≤10m,大概在3~4m左右。虽然还需详细数据评估,但SLIM的主要目标——100m精度的着陆技术演示已经实现。

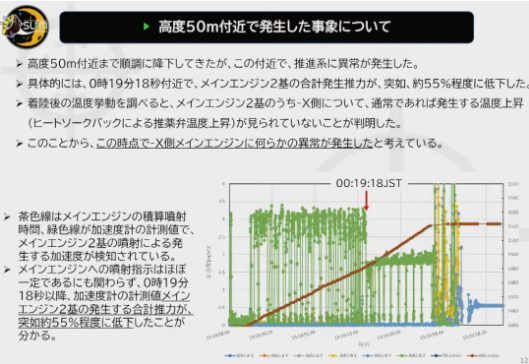
通过数据分析,任务团队发现了着陆器月面姿态异常,太阳能电池不发电的原因。在50m高度避障操作开始前,两台主发动机其中一台没有推力。在这种情况下,SLIM的机载软件自动判断出异常情况,并利用另一台发动机继续下降,同时控制逐渐向东移动的SLIM的水平位置。下降速度约为1.4 m/s,低于预期范围,但由于侧向速度和姿态等着陆条件超出了预期范围,导致着陆姿态异常。详细原因正在调查中。
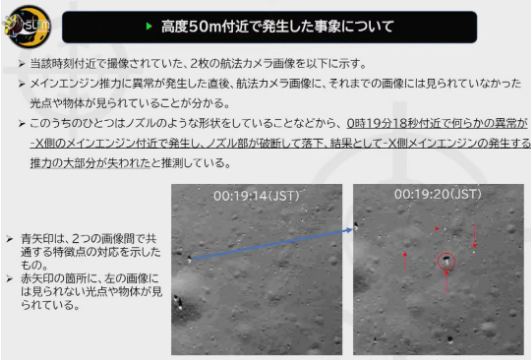
图片显示喷管断裂坠落。
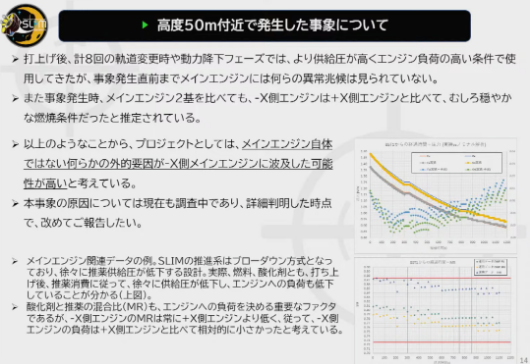
SLIM着陆器推进系统为MON-3/N2H4双组元推进系统,由2台500N双组元复合材料发动机(代号分别为OME-Mx,OME-Px)和12台22N双组元发动机(代号THR1-12)组成。2台500N发动机用于轨道控制和精确速度增量控制,12台22N发动机用于姿态控制。
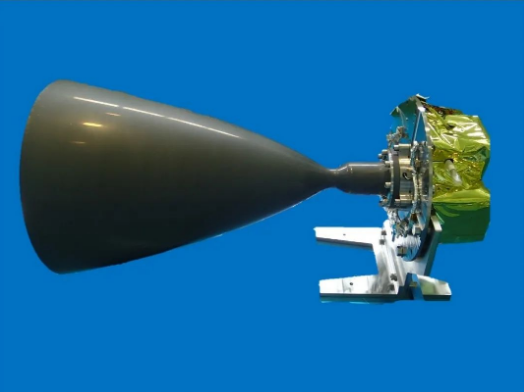
主发动机照片
有分析认为SLIM的太阳能电池目前面向西,因此如果未来阳光从西面照射到月球表面,太阳能电池有发电的可能性。
任务团队已获取与着陆前的导航引导相关的所有技术数据,用于未来的精确着陆技术。在着陆之前,小型月表机器人(LEV-1和LEV-2)从着陆器上成功释放。
任务团队收到了LEV-2拍摄的图像,从图中可看出着陆器姿态异常。该图像通过LEV-1传输到地面,证明LEV-1和LEV-2之间的通信功能正常运行。

参考文献
[1] JAXA | Smart Lander for Investigating Moon (SLIM)[EB/OL]. [2024-1-25]. https://global.jaxa.jp/press/slim/.




评论 (0人参与)
最新评论