
无人机飞控原理之姿态控制

为了深入理解无人机的姿态控制,我们可以从较为简单的单旋翼直升机入手,逐步过渡到更为复杂的四旋翼无人机。这种由简入繁的方法有助于清晰地展示姿态控制的基本原理及其演变过程。单旋翼直升机的设计和操作原理为多旋翼无人机提供了基础概念,而四旋翼无人机则是这些概念在现代无人飞行系统中的具体应用和发展。本文将按照这一路径,首先探讨单旋翼直升机的尾桨作用,然后分析无尾桨设计的解决方案,最终聚焦于四旋翼无人机的姿态控制机制。

主旋翼反扭矩效应
直升机的主旋翼在旋转时产生升力的同时,也会根据牛顿第三定律对机身施加一个等大但方向相反的反扭矩(reaction torque)。这个反扭矩会导致直升机机体沿与主旋翼旋转方向相反的方向旋转,即所谓的自旋现象。例如,如果主旋翼顺时针旋转,那么机身就会有逆时针旋转的趋势。如果不加以控制,这种自转会使直升机难以稳定飞行,并且飞行员很难保持航向

尾桨的作用
为了抵消主旋翼产生的反扭矩并保持航向稳定,传统单旋翼直升机配备了尾桨。尾桨通过产生侧向推力来对抗主旋翼的反扭矩,从而确保直升机能够在空中稳定飞行而不自转。此外,飞行员可以通过调整尾桨的推力大小来实现偏航控制,即转向操作。尾桨不仅解决了自转问题,还赋予了直升机灵活的转向能力。然而,尾桨的存在也带来了额外的复杂性和维护成本,因此一些新型直升机设计探索了无需尾桨的解决方案。


双旋翼直升机
双旋翼直升机采用两个主旋翼,它们以相反方向旋转。这种设计使得两个旋翼产生的反扭矩相互抵消,因此不需要额外的尾桨来平衡反扭矩。典型例子包括波音CH-47支奴干直升机。双旋翼直升机的优势在于更高的升力效率和更好的操控稳定性,尤其是在高速飞行时。由于两个旋翼可以提供更大的升力,双旋翼直升机能够承载更重的货物或进行更远距离的飞行。

共轴双旋翼直升
共轴双旋翼直升机则是在同一轴线上安装上下两个主旋翼,同样以相反方向旋转。这样的布局不仅有效地抵消了反扭矩,还提高了升力效率和空间利用率。卡莫夫设计局的Ka系列直升机就是这种设计的代表。共轴双旋翼直升机的优点是结构紧凑、抗风能力强,适合在狭窄空间内作业,如森林灭火或城市搜救任务。此外,由于没有外部尾桨,这种设计也减少了碰撞风险,增加了安全性。

 四旋翼无人机的结构类比 四旋翼无人机可以被视为两只双旋翼直升机绑在一起。每个四旋翼都有四个旋翼,其中对角线上的两个旋翼以相同方向旋转(例如顺时针),而另外两个则以相反方向旋转(逆时针)。这样,所有旋翼产生的反扭矩再次相互抵消,实现了类似双旋翼直升机的效果,也就是无需额外的抗扭装置即可保持稳定。这种设计不仅简化了结构,还提高了飞行的灵活性和可控性。
四旋翼无人机的结构类比 四旋翼无人机可以被视为两只双旋翼直升机绑在一起。每个四旋翼都有四个旋翼,其中对角线上的两个旋翼以相同方向旋转(例如顺时针),而另外两个则以相反方向旋转(逆时针)。这样,所有旋翼产生的反扭矩再次相互抵消,实现了类似双旋翼直升机的效果,也就是无需额外的抗扭装置即可保持稳定。这种设计不仅简化了结构,还提高了飞行的灵活性和可控性。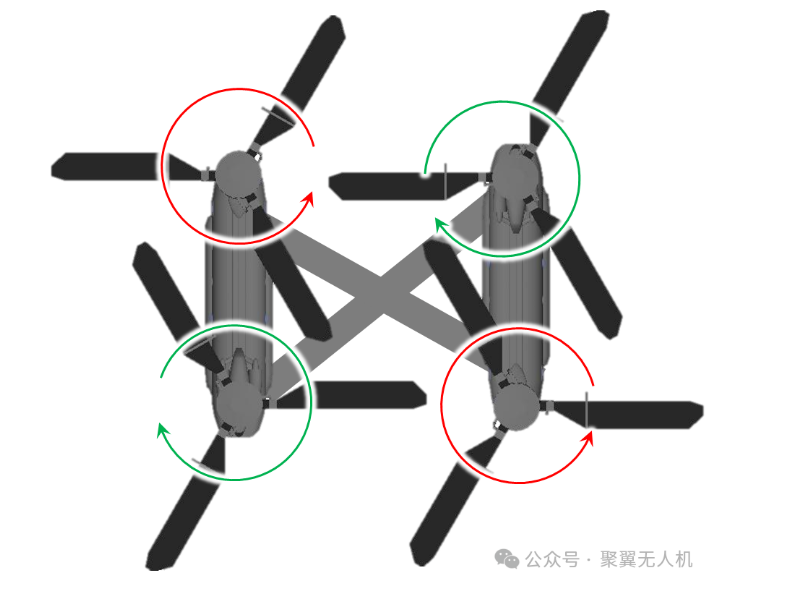
姿态控制机制
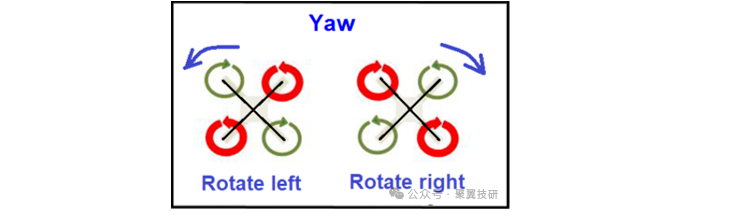
● 自旋控制(偏航):通过调整对角线上旋翼的速度差异来改变整体的反扭矩平衡,从而使无人机能够实现偏航运动。例如,增加顺时针旋翼的速度同时减慢逆时针旋翼的速度,无人机将向逆时针方向旋转;反之亦然。
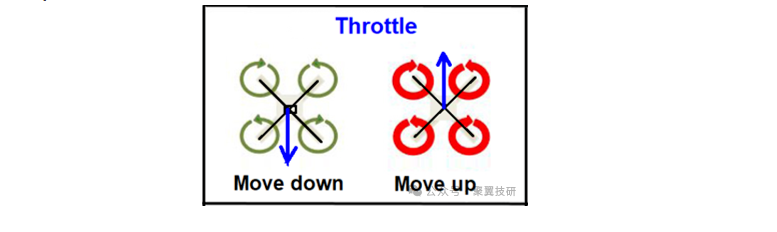
● 上升与下降:同步增加或减少所有四个旋翼的转速,以提高或降低总升力,进而实现垂直方向上的移动。当所有旋翼转速一致时,无人机可以保持悬停状态;增加转速则会上升,减小转速则会下降。
 ● 俯仰和横滚:分别调整前后或左右两侧旋翼的速度差,使无人机围绕其纵轴(俯仰)或横轴(横滚)倾斜,以此来控制前进、后退、左移或右移的动作。例如,增加前侧旋翼的速度同时减慢后侧旋翼的速度,无人机将向前倾斜并前进;同理,调整左右两侧旋翼的速度可以实现左右移动。
● 俯仰和横滚:分别调整前后或左右两侧旋翼的速度差,使无人机围绕其纵轴(俯仰)或横轴(横滚)倾斜,以此来控制前进、后退、左移或右移的动作。例如,增加前侧旋翼的速度同时减慢后侧旋翼的速度,无人机将向前倾斜并前进;同理,调整左右两侧旋翼的速度可以实现左右移动。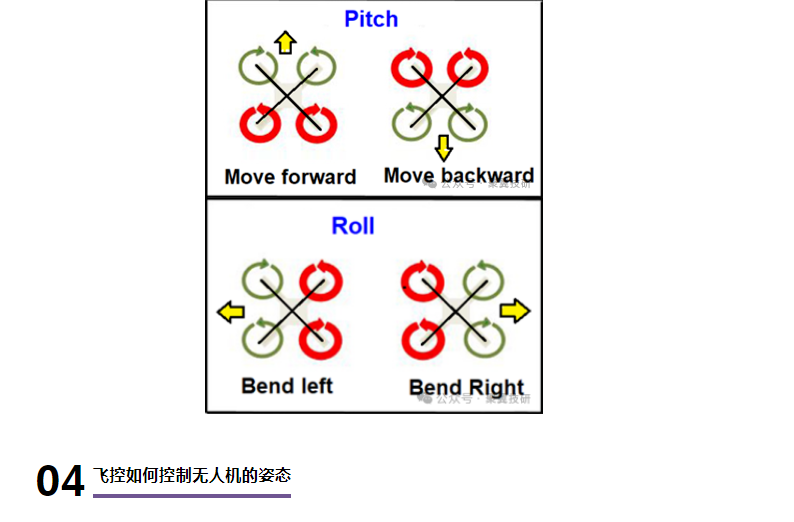
控制算法
飞控系统利用先进的控制算法,如PID控制器,来精确调节各个旋翼的转速。PID控制器是一种广泛应用于工业自动化领域的反馈控制系统,它通过比例(P)、积分(I)和微分(D)三个参数来调整输出值,以达到预期的目标。在无人机姿态控制中,PID控制器根据传感器提供的实时数据,计算出适当的控制指令,确保无人机能够快速响应并维持预期的姿态。例如,当无人机偏离水平位置时,PID控制器会立即调整相关旋翼的转速,使无人机恢复到正确的位置。
传感器融合
飞控系统整合来自多种传感器的数据,进行传感器融合处理,以获得更加准确和可靠的姿态估计。常用的传感器包括加速度计、陀螺仪和磁力计。加速度计测量无人机的线性加速度,陀螺仪检测角速度变化,磁力计则提供地球磁场信息用于航向参考。通过融合这些传感器的数据,飞控系统能够构建一个三维坐标系,实时跟踪无人机的姿态变化,并据此作出相应的调整。传感器融合技术不仅提高了姿态估计的精度,还增强了系统的鲁棒性和适应性。
动态调整
飞控系统还能够根据外部因素(如风速变化、气流扰动等)动态调整控制策略,保证无人机即使在复杂环境中也能保持良好的飞行品质。例如,在强风条件下,飞控系统可以通过增加特定旋翼的转速来抵抗风力的影响,保持无人机的稳定飞行。此外,飞控系统还可以根据不同的飞行模式(如自动巡航、手动操控等)优化控制参数,提供最佳的飞行体验。对于一些高级应用,如编队飞行或自动避障,飞控系统还需要集成更多的传感器和技术,如视觉识别、激光雷达等,以实现更复杂的功能。







评论 (0人参与)
最新评论